Nora Kurth
Tray
Find out about how Robo Dog got his Tray!

Tray for the Functional Model (Try 2)
The Idea
A normal dog would maybe carry tools to bring you in it's mouth or a harness. Both options Robo Dog does not have. That is why a tray to go on top of Robo Dog's body was designed.
The tray was designed to be detachable, making it possible to swap out trays instead of having to empty out all tools for different projects.
The Design
As base for the design the laser cutting template of the inner box of a Sliding Drawer form BOXES.PY was used.
To stop the tray from sliding off of Robo Dogs back, slits were added in the corners at the locations of the corresponding stuctures in the body. Small rectangles were fitted into these slits, to create angles, securing the tray on top of the body.
In the first try, some measurements were still a little bit off. Additionally it was noticed that there were parts, which were to thinn and accordingly very prone to breaking.
After correcting the offset and making the hole tray larger, the Tray could be assemled with only minor touch ups (some rasping) necessary.
Tests (and Accessoirs) for the Tray

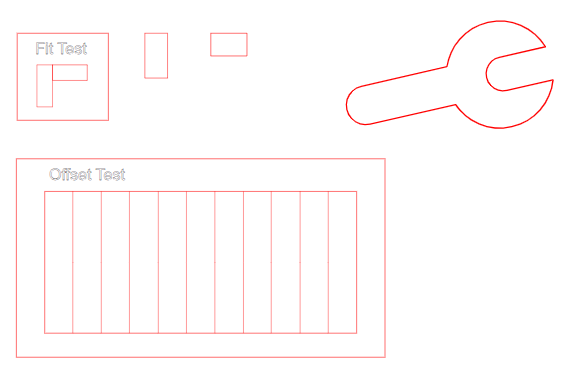
Offset Test cut
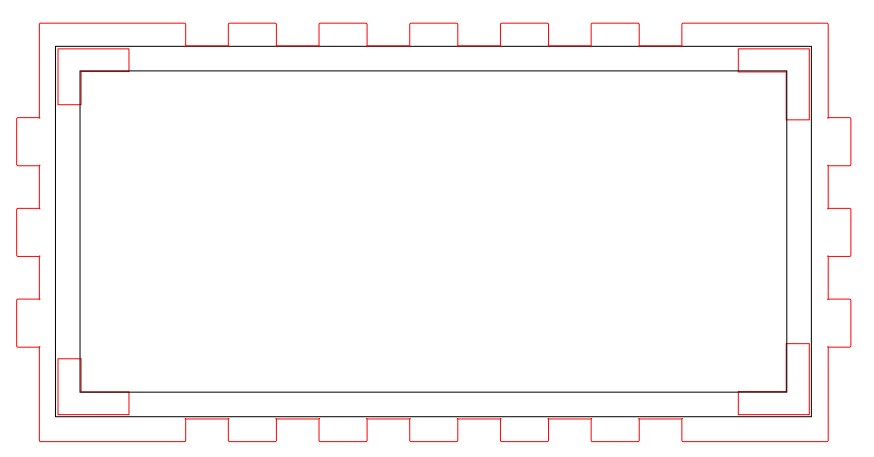
Construction Sketch with Abstract of the Top of the Body
Sketch of Try 1

Try 1 still in the Laser Cutter
Try 1 assembled (with Breakage at Weak Point)
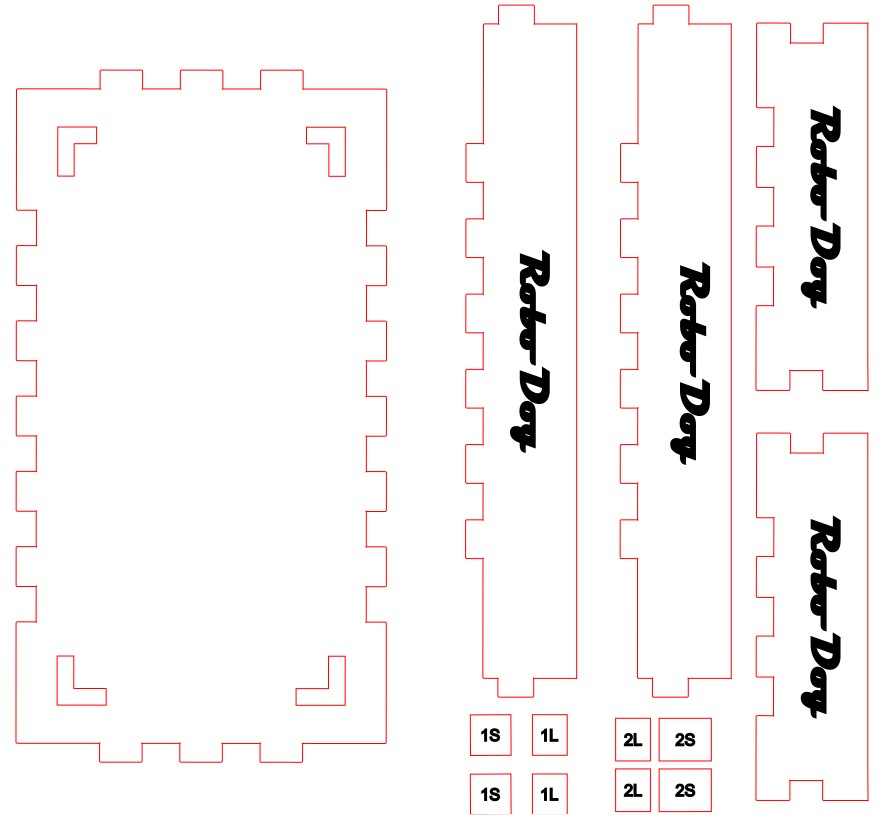
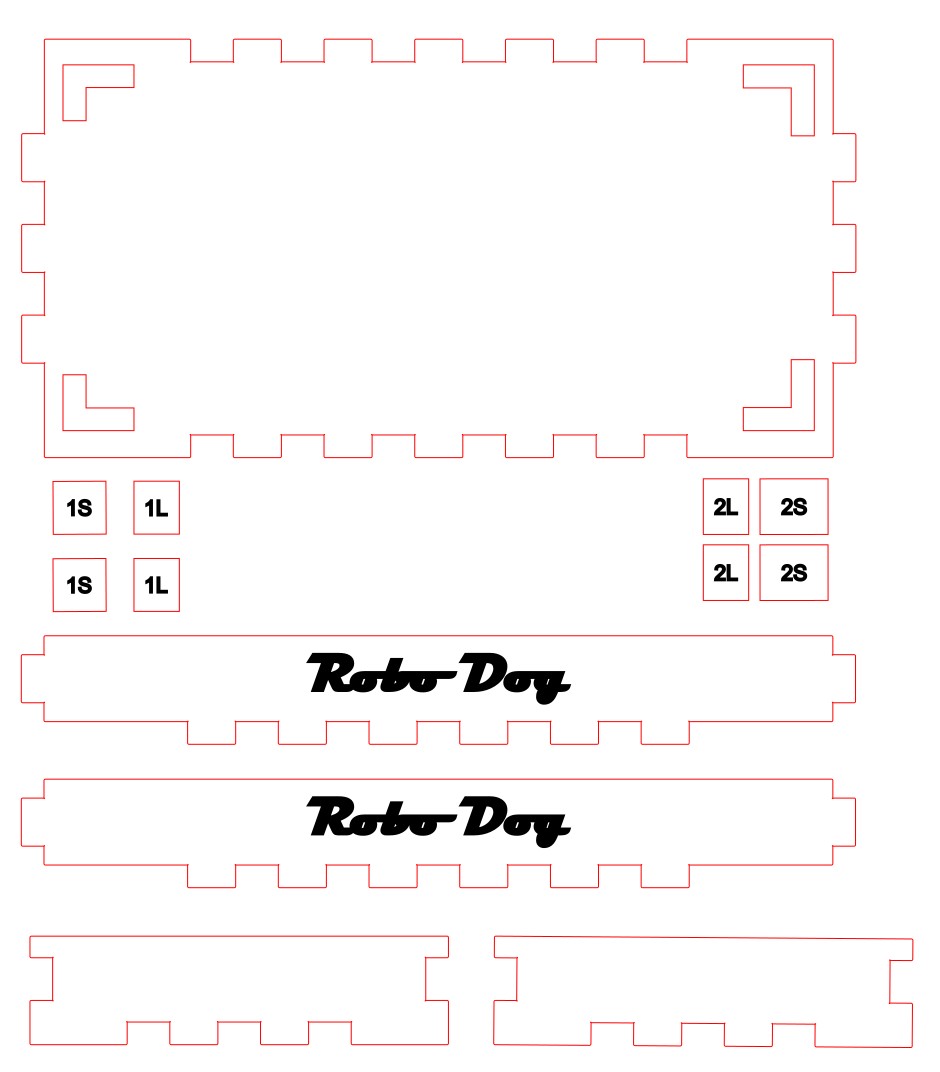
Sketch of Try 2

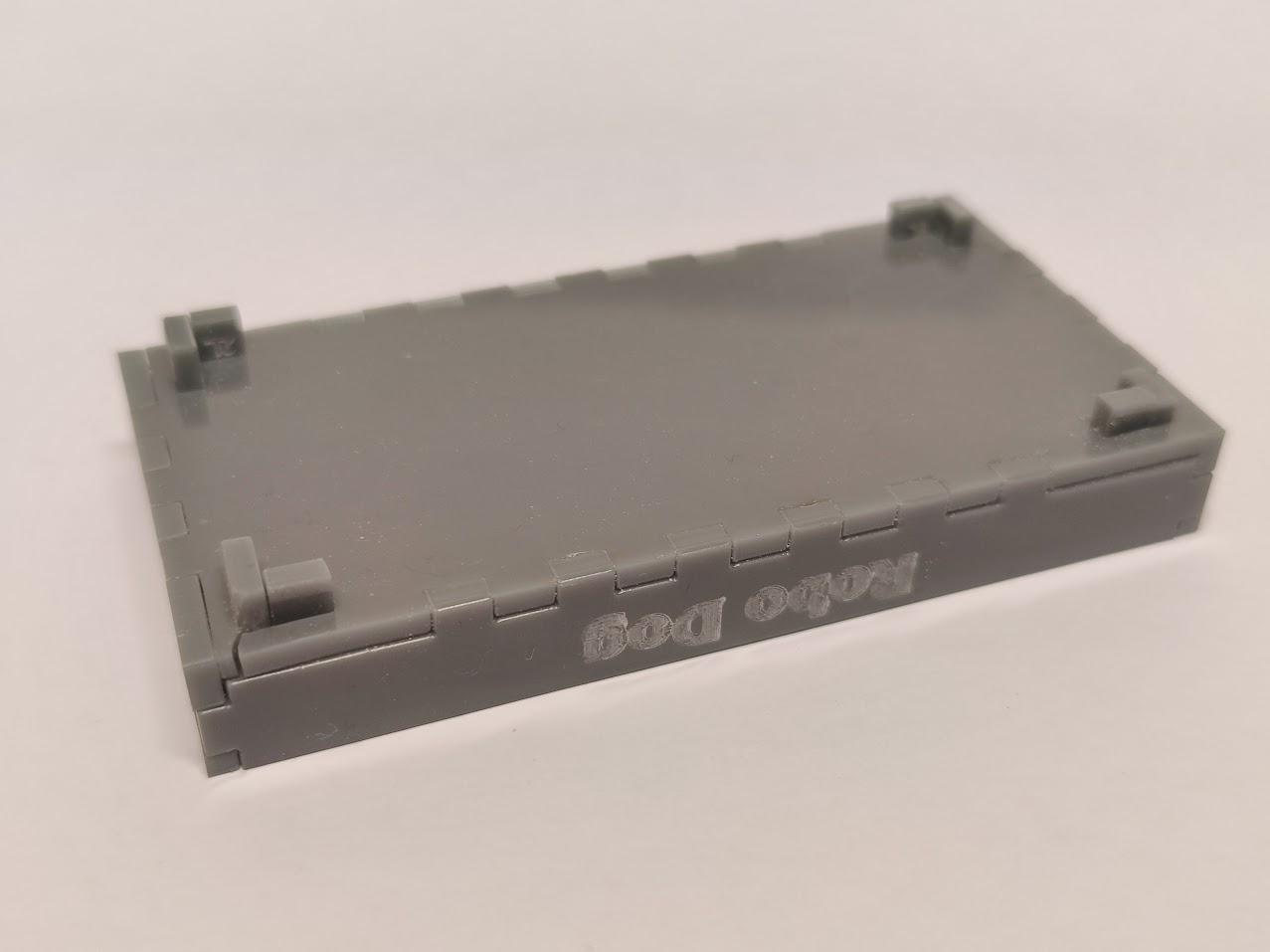
Try 2 for the Static Model assembled