Nora Kurth
Walking Robot
The first build with more than one manufacturing method.
For this project we built a small and simple Robot designed by Marcello, the body and legs were laser cut from PlexiGlas and the spacers and connections to the servo for the legs were 3D-printed with PLA. Additionally one servo, two AA batteries in a compartment and some screws and nuts were needed. The wires from the battery compartment were soldered to the the servo for a better connection.
In preparation of the laser cutting for this profect, we got together in groups to measure the kerv of the laser used. Check out the process and ressults of this on Jan-Erik's page.
3D Printing
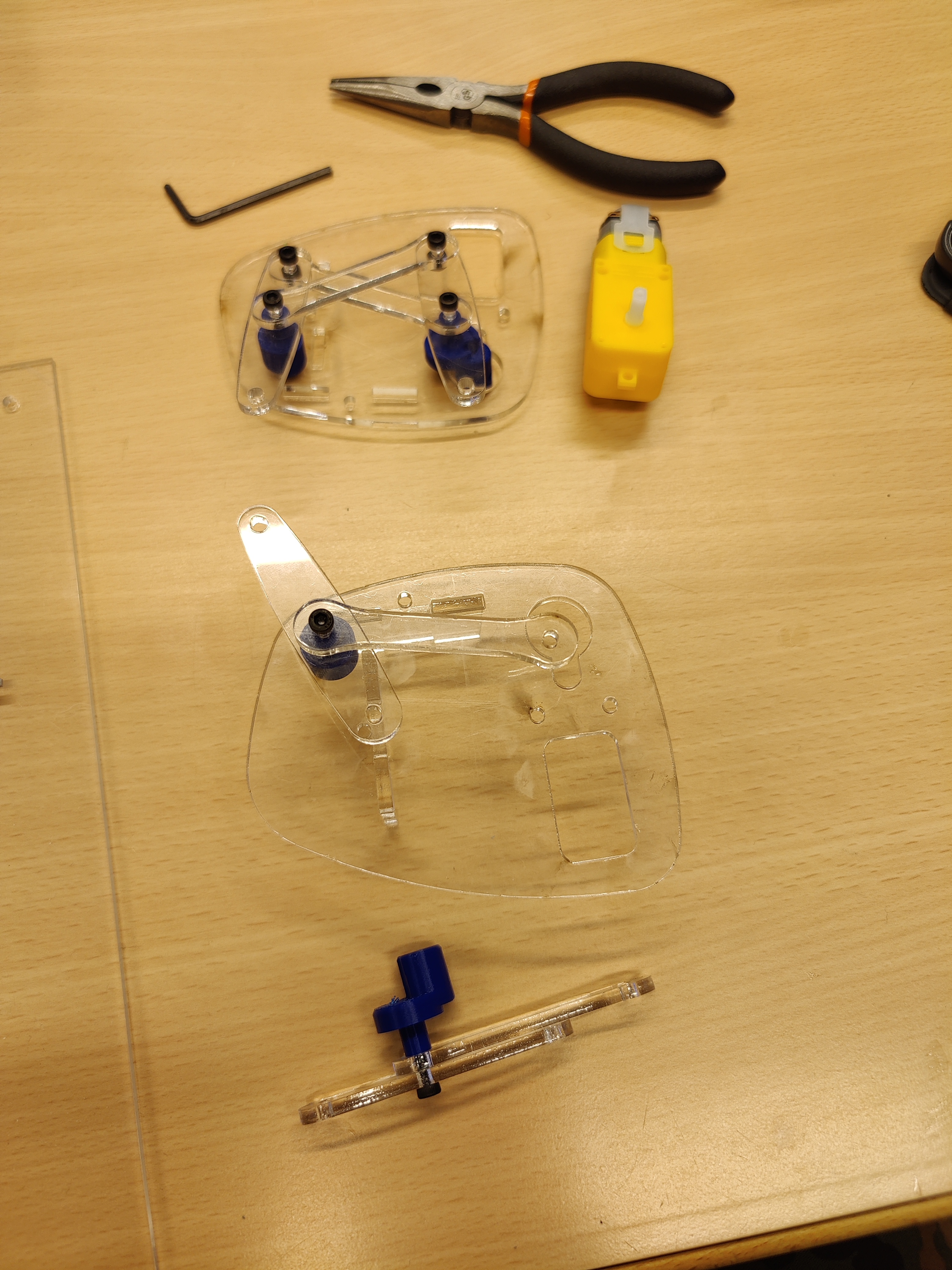
During the Assembly Process
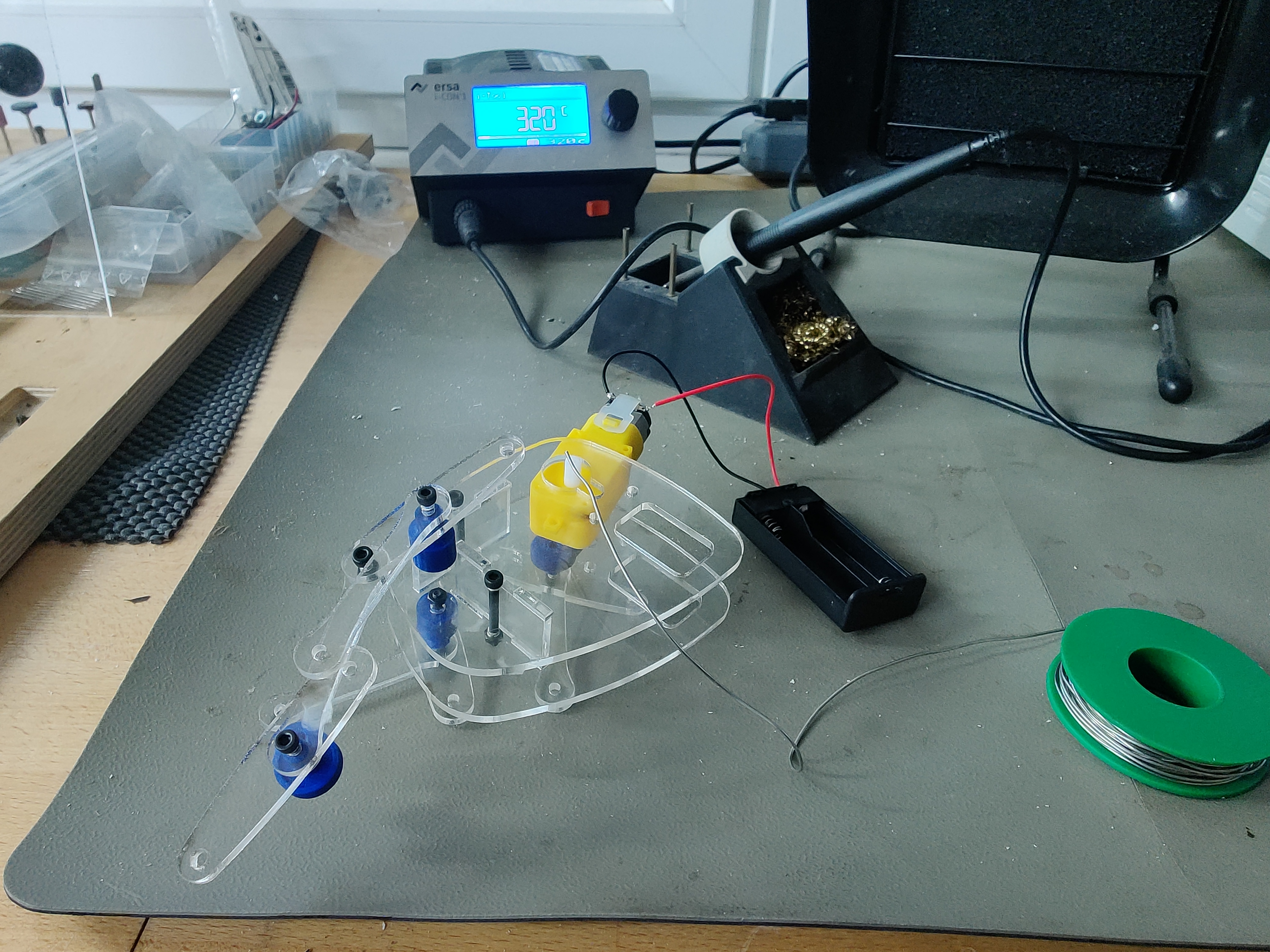
Soldering (recommended to be done before inserting the servo into the body)
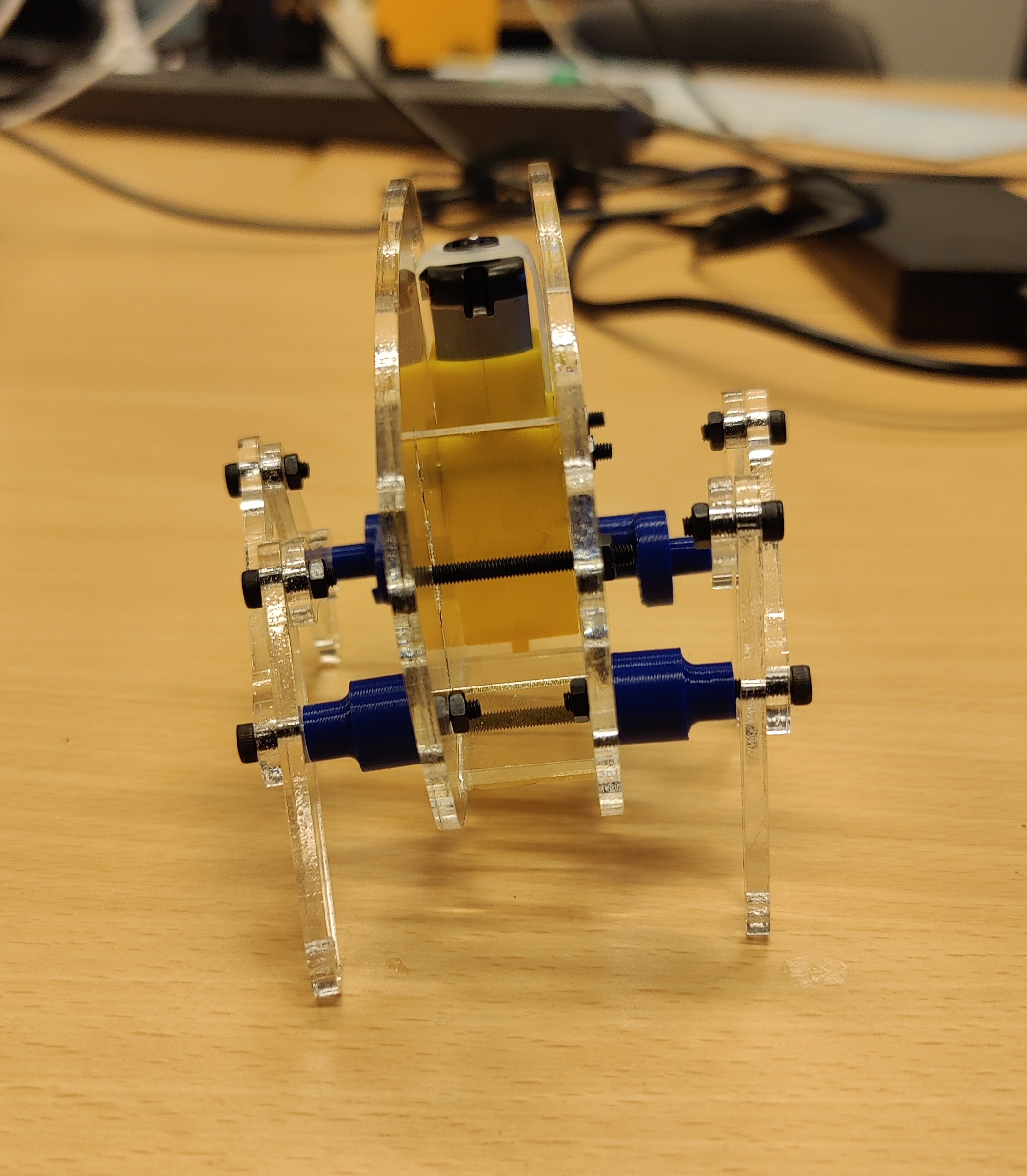
Assembly (almost) done
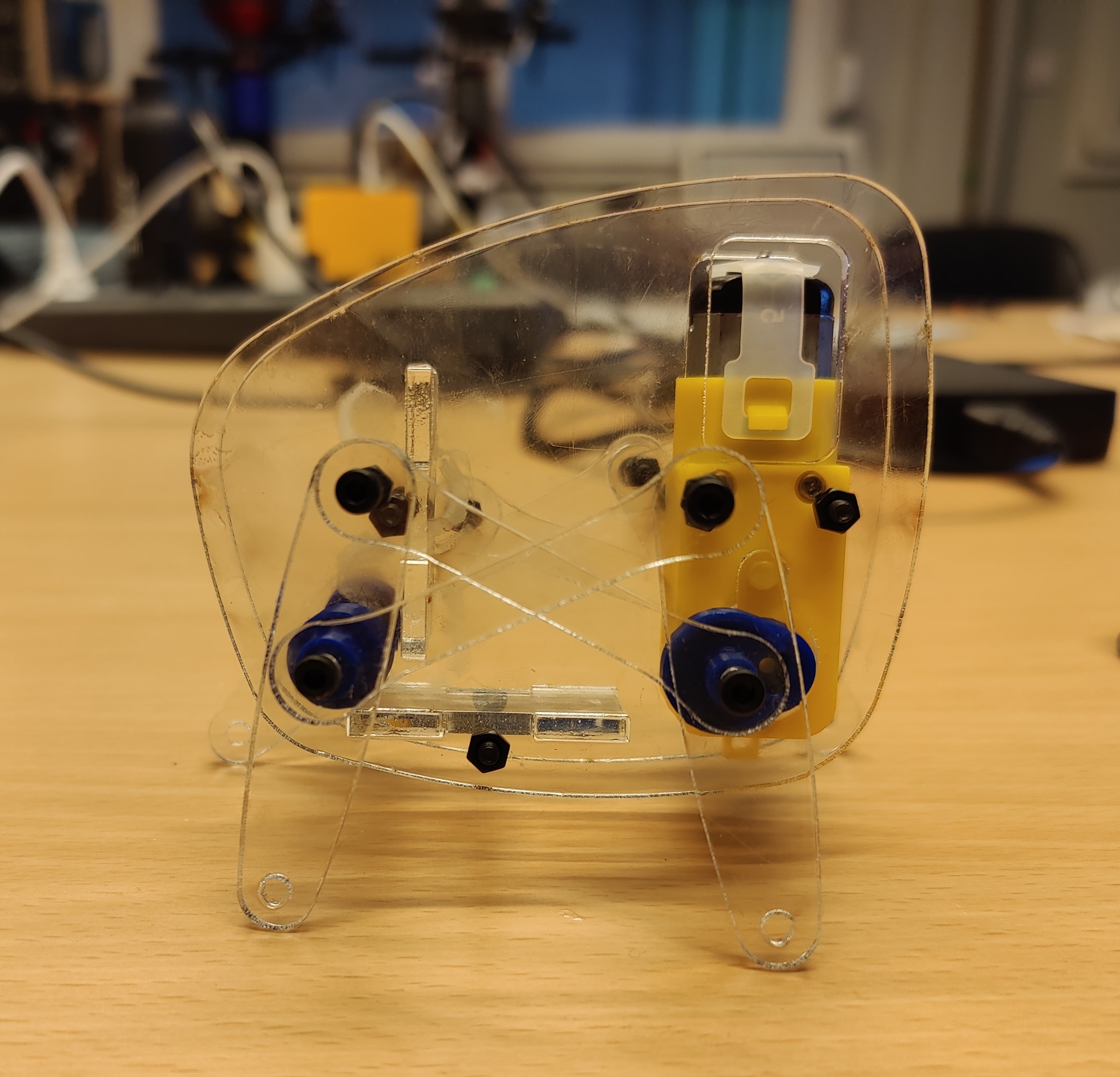
Side View without Battery Compartment installed
Assembled and Walking